„Lock-in programming, investigation of a quartz sensor” változatai közötti eltérés
(→Nanophysical application of quartz oscillators used in watches) |
|||
| 101. sor: | 101. sor: | ||
</wlatex> | </wlatex> | ||
| − | == | + | ==Tools used in this lab== |
<wlatex> | <wlatex> | ||
*SRS830 Lock-In + használati utasítás + tápkábel | *SRS830 Lock-In + használati utasítás + tápkábel | ||
| 121. sor: | 121. sor: | ||
</wlatex> | </wlatex> | ||
| − | == | + | ==Supplementary information== |
| − | + | *For the testing the connection of the serial port one can use [[NI_MAX#Soros_porti_csatlakoz.C3.A1s|NI MAX (description in Hungarian)]]. In the measurement controller program use the <tt>SerialPort</tt> object ([[USB_hőmérő_példaprogram|example]]). In case of the SR830 lock-in amplifier set up the parameters with the following code: | |
<syntaxhighlight lang="csharp"> | <syntaxhighlight lang="csharp"> | ||
serialPort1.PortName = "COM1"; | serialPort1.PortName = "COM1"; | ||
| 134. sor: | 134. sor: | ||
serialPort1.Handshake = Handshake.None; | serialPort1.Handshake = Handshake.None; | ||
</syntaxhighlight> | </syntaxhighlight> | ||
| + | Note that, the baud rate can be changed on the amplifier, check it in its own menu. The <tt>serialPort1</tt> is the name of an object, use it consequently. Do not forget to set up the <tt>PortName</tt> property in the proper way (the default value in case of the serial port of the motherboard is <tt>COM1</tt>). | ||
| − | + | *[[Függvény generátor | Sample code for the function generator via USB]] and [http://www.ni.com/download/ni-visa-17.0/6646/en/ NI VISA driver] | |
| − | + | *[[Függvény generátor GPIB | Sample code for the function generator via GPIB]] and [http://www.ni.com/download/ni-488.2/7272/en/ GPIB driver] | |
| − | + | ||
| − | [[Függvény generátor | | + | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | [http://www.ni.com/download/ni-488.2/7272/en/ | + | |
A lap 2020. szeptember 9., 19:56-kori változata
Tartalomjegyzék |
Purpose of the measurement
The purpose of this measurement is to learn the usage and programming of the Stanford Research Systems SRS830 digital lock-in amplifier. For this purpose you're going to do a test measurement on an LC circuit, then you'll investigate and characterize a quartz sensor similar that can be used in atomic force microscopy (AFM) devices.
Nanophysical application of quartz oscillators used in watches
A quartz resonator used in quartz clocks is shown in the left side of Figure 1. Similar devices are being used to generate clock signal in electronic circuits, their most important parameter is the resonance frequency. The tuning fork (TF) shaped oscillator in the Figure 1. has a nominal resonance frequency of 32 768 Hz (= 215 Hz).
Due to the piezoelectric properties of crystalline quartz the oscillation of the tuning fork can be excited by electric voltage. Obviously, a body shaped like this has several vibration modes, but the electrodes are made in such way they mainly excite the mode where the prongs of the tuning fork stay in their plane and their leaning is symmetric in a way their displacements are opposite. During a vibration in this mode there are no force or angular momentum acting on the foot piece of the TF, so it is only weakly coupled to its environment. Therefore it can keep its resonance even in wristwatches where it is exposed to rapidly changing acceleration.
While applying AC voltage to its electrodes the deformation of the crystal is being periodic, it starts to vibrate. When the frequency of the applied voltage equals to the resonance frequency of the crystal, the amplitude of the vibration can be extremely high. For the detection of the vibration one measures the current between the electrodes which is proportional the velocity of the prongs of the tuning fork. This current has a maximum value at the resonance frequency illustrated by the resonance curve in the right side of Figure 1.
 |
 |
| Figure 1. A quartz resonator used in watches (left) and its resonance curve (right). This curve is the amplitude of the current of the device in the function of the frequency of the constant amplitude excitation voltage. Source: András Magyarkuti MSc thesis (BME, Department of Physics, 2013, in Hungarian). | |
In a conventional atomic force microscope a sharp tip is placed at the end of a cantilever, then it is approached to the surface of a sample. The movement of the cantilever is usually detected by a laser beam reflected from its other side. In dynamic mode a vibration in the cantilever is excited near to its resonance frequency. When the tip is close to the sample, due to the force between the surface and the end of the tip, the resonance frequency of the cantilever is different than it would be during free vibration. While sweeping the tip over the sample in x and y directions the z height of the cantilever is being continuously adjusted in a way the resonance frequency of the vibration is constant, so are the force and distance between the sample and the tip as it is shown in the video of Figure 2. (Note that the change in resonance frequency is not proportional to the force but to the spring constant of the system which is proportional to the derivative of the force respect to the distance of the tip and the sample.) Since the z height of the tip is known (it is controlled by us) its dependence on the x and y positions gives the topography of the sample even in atomic resolution.
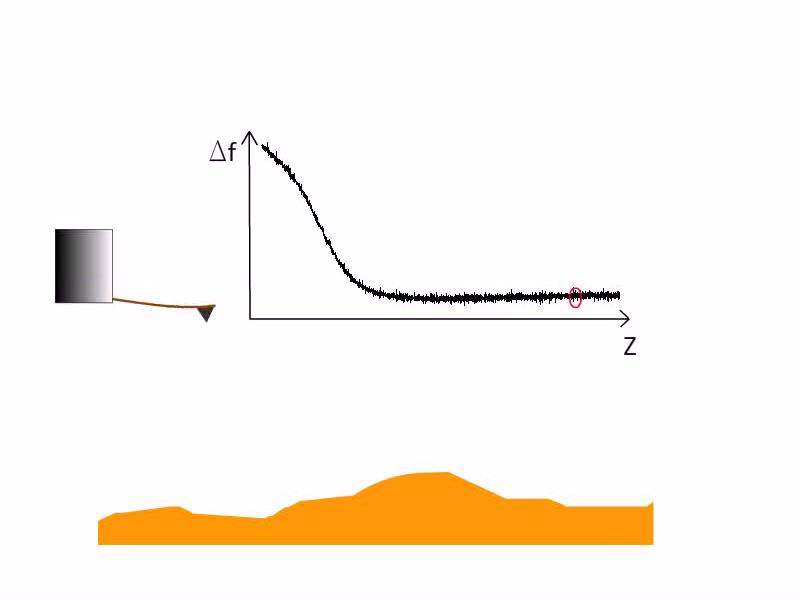 |
| Figure 2. The principle of atomic force microscopy in non-contact dynamic mode. Source: András Magyarkuti MSc defense (BME, Department of Physics, 2013). |
During low temperature AFM measurements the optical detection of the cantilevers movement is very challenging. Therefore it is practical to use a sensor which movement can be measured in an electrical way. The simple and cheap quartz tuning fork shown in Figure 1. is suitable to be used in an AFM device by attaching a sharp tip on one of its prongs because of the high quality factor of its resonance which ensures that a small force on the tip causes a measurable change in the resonance frequency. It is demonstrated in Figure 3. On the left side there is scanning tunneling microscope (STM) image of a gold coated nanostructure (the height of the tip was adjusted in a way that the tunneling current was constant), on the right side the same area was mapped with a tuning fork keeping the force (and the resonance frequency) constant between the sample and the tip. The main features of the two images are matching.
 |

|
| Figure 3. The topography of a gold coated surface measured in scanning tunneling and atomic force microscopy mode. Source: András Magyarkuti MSc thesis (BME, Department of Physics, 2013, in Hungarian). |
You can reach further information about scanning probe microscopy in Nanofizika tudásbázis, Nanoszerkezetek előállítási és vizsgálati technikái (Hungarian).
A simple model for the quartz resonator
The simplest model for an elastic piezoelectric system like the quartz resonator with one degree of freedom is an  mass which can move only in
mass which can move only in  direction attached to a spring with an effective spring constant
direction attached to a spring with an effective spring constant  . The piezoelectric coupling can be described by the
. The piezoelectric coupling can be described by the
![\[ \left(\begin{matrix} z \\ Q \end{matrix}\right) = \left(\begin{matrix} k^{-1} & s \\ s & C \end{matrix}\right)\cdot \left(\begin{matrix} F \\ U \end{matrix}\right)\]](/images/math/1/1/f/11f958437f7f14b356a0ec4a6acbb677.png)
matrix equation, where is the displacement,  is the charge on the electrodes of the resonator,
is the charge on the electrodes of the resonator,  is the force,
is the force,  is the voltage between the electrodes,
is the voltage between the electrodes,  is the displacement induced by a unit voltage when
is the displacement induced by a unit voltage when  , is the effective spring constant when
, is the effective spring constant when  , and
, and  is the capacity of the system when . Since the conservation of the energy the determinant of the matrix in the equation is
is the capacity of the system when . Since the conservation of the energy the determinant of the matrix in the equation is  , which means
, which means  . Due to this coupling the charge on the electrodes is proportional to the displacement of the system:
. Due to this coupling the charge on the electrodes is proportional to the displacement of the system:
![\[Q = \alpha \cdot z\]](/images/math/d/6/8/d68a6dd0d6ac5afb20460b77f6918c90.png)
where  .
.
To describe the dynamics of the system one must consider the damping due to the drag of the fluid around it. If it is proportional to the velocity of the electrodes, then the mechanical equation of motion is
![\[m \ddot{z} = -kz - \gamma \dot{z} + \alpha U\]](/images/math/4/1/b/41bfd22c4cca1e76bbcaaa30639eb6ca.png)
where  is the damping ratio.
is the damping ratio.
From  the current of the sensor is proportional to the velocity of the oscillator:
the current of the sensor is proportional to the velocity of the oscillator:  . If we substitute this to the mechanical differential equation of motion, we get an equation what describes a series RLC circuit driven by voltage , and where the
. If we substitute this to the mechanical differential equation of motion, we get an equation what describes a series RLC circuit driven by voltage , and where the  ,
,  and electrical parameters correspond to the , and mechanical parameters via the piezoelectric constant .
and electrical parameters correspond to the , and mechanical parameters via the piezoelectric constant .
Finally, we should not forget about the capacitance of the electrodes of the system, which would be there even when the material between them is not piezoelectric. It appears in the model as a  capacity parallel to the RLC circuit as shown in Figure 4. This equivalent circuit describes the electric behaviour of quartz sensors in a very accurate way.
capacity parallel to the RLC circuit as shown in Figure 4. This equivalent circuit describes the electric behaviour of quartz sensors in a very accurate way.
 |
| Figure 4. The electric equivalent circuit of quartz resonators. |
In this model the formula for the absolute value of complex impedance of a quartz resonator is
![\[|Z|=\frac{\sqrt{(A-\omega^2)^2+D^2 \omega^2}}{E \omega \sqrt{(B-\omega^2)^2+D^2\omega^2}}\]](/images/math/7/f/c/7fc534ab9c2d8cde6b2329a20361ad42.png)
![\[A = \frac{1}{L C}, \quad B = \frac{C + C_0}{C_0 C L}, \quad D = \frac{R}{L}\quad\text{and}\quad E = C_0.\]](/images/math/3/f/d/3fd1f03cc2084ba2c9ee208a8dd5c933.png)
Measurement tasks
1. Áramgenerátoros meghajtással vegyük fel a mellékelt párhuzamos LC kör impedanciáját a frekvencia függvényében, határozzuk meg a rezonancia-frekvenciát, a kapacitás, az induktivitás ill. az induktivitás soros ellenállásának az értékét. A mért görbét hasonlítsuk össze az elméleti várakozásokkal. A méréshez írjunk számítógépes programot, mely GPIB porton kommunikál a műszerrel. A program adott számú lépésben logaritmikus skálán változtassa a frekvenciát egy megadott kezdő és végfrekvencia között, és vegye fel a bemeneten mért jel  és
és  és/vagy és
és/vagy és  komponensét a frekvencia függvényében. Figyeljünk az időállandó helyes beállítására!
komponensét a frekvencia függvényében. Figyeljünk az időállandó helyes beállítására!
- A lock-in erősítő kimenete feszültséggenerátorként viselkedik, azaz ha a kimenetre
 -nál lényegesen nagyobb impedanciájú terhelést teszünk, akkor a kimenet az impedanciától függetlenül konstans a.c. feszültséget ad ki. Hogyan készíthetünk áramgenerátoros meghajtást megvalósító áramkört? Úgy állítsuk be a paramétereket, hogy miközben az RC-kör impedanciája változik a frekvencia függvényében, a meghajtó áram kevesebb mint 1%-ot változzon!
-nál lényegesen nagyobb impedanciájú terhelést teszünk, akkor a kimenet az impedanciától függetlenül konstans a.c. feszültséget ad ki. Hogyan készíthetünk áramgenerátoros meghajtást megvalósító áramkört? Úgy állítsuk be a paramétereket, hogy miközben az RC-kör impedanciája változik a frekvencia függvényében, a meghajtó áram kevesebb mint 1%-ot változzon!
2. Az 1. feladatban készült mérőprogramból kiindulva vegyük fel a mellékelt tokozott kvarcoszcillátor rezonanciagörbéjét feszültséggenerátoros meghajtást használva. Az áram méréséhez ne a lock-in áramerősítő bemenetét, hanem egy soros ellenállást használjunk. Ennél a mérésnél a pontosabb frekvenciabeállítás érdekében jelforrásként egy Siglent függvénygenerátort használjunk. A lock-in generátorát az Siglent függvénygenerátorhoz szinkronizáljuk, a kvarcoszcillátorra a lock-in kimenetéről adjuk ki a jelet. A mérési eredmények illesztéséből határozzuk meg az oszcillátor elektromos paramétereit, azaz , , és értékét!
- Figyelem! A kvarcoszcillátor tönkremehet, ha a rezonanciafrekvencián túl nagy feszültséggel gerjesztjük. Ügyeljünk rá, hogy a beállított gerjesztés amplitúdója ne haladja meg a 0.1 V feszültséget!
- Ügyeljünk arra, hogy a rezonancia környékén gerjesztett oszcillátor rezgése nagyon lassan cseng le, így a frekvencia változtatásakor sokat kell várni arra, hogy az új frekvenciához tartozó állandósult állapot kialakuljon! A mért jósági tényező alapján becsüljük meg, hogy mennyi idő alatt cseng le a rezonáns rezgés! Kisérletileg hogyan ellenőrizhetjük a legegyszerűbben, hogy elég lassan mérünk-e, azaz hogy minden mérési pontnál csak az adott frekvencián rezeg az oszcillátor, és a korábbi gerjesztés már lecsengett?
- A rezonancia környékén érdemes nagy frekvenciafelbontással, lineáris lépésközzel felvenni az impedancia frekvenciafüggését. Figyelem, a párhuzamos kapacitás miatt nem egy egyszerű rezonanciagörbét látunk, hanem egy adott frekvencián antirezonancia is jelentkezik, ahol az oszcillátor árama minimális. Ne feledkezzünk meg ennek a kiméréséről sem!
- A frekvenicafüggő impedanciát érdemes széles tartományban, logaritmikus skálán is felvenni. Melyik paramétert állapíthatjuk meg ebből a mérésből?
3. Egy fogó segítségével ropogtassuk meg az oszcillátor tokozásának nyakát, és távolítsuk el a tokot. Mérjük meg a kibontott oszcillátor rezonanciagörbéjét! Digitális mikroszkóp alatt kenjük be az egyik ág végét vákuumzsírral, majd helyezzünk fel az oszcillátor végére rövid rézdrót-darabokat (lásd 5. ábra). Mérjük ki, hogy a felhelyezett tömeg függvényében hogyan változik meg az oszcillátor rezonanciafrekvenciája. Az eredmények alapján határozzuk meg az oszcillátor effektív tömegét, és effektív rugóállandóját!
- Miért romlik el a tok kibontásakor a jósági tényező?
- Figyelem, a tömegek felhelyezésekor elromlik a hangvilla szimmetriája, és így a jósági tényező is lecsökken. Ennek megfelelően túl nagy tömeg mellett már nem tudunk jól értékelhető mérést végezni, így ügyeljünk arra, hogy vákuumzsírból a drótok felragasztásához szükséges minimális mennyiséget vigyük fel!
 |
| 5. ábra |
4. Az elektromos és mechanikai paraméterek (,, , , , ) ismeretében, a fent ismertetett egyszerű modell alapján számoljuk ki, hogy 1V egyenfeszültség hatására mekkora az oszcillátor elmozdulása. Ezen eredmény alapján adjunk becslést arra, hogy egy kvarc hangvillából készített atomerő-mikroszkóp szenzort a rezonanciafrekvencián milyen amplitudójú a.c. feszültséggel kell gerjeszteni ahhoz, hogy a mechanikai rezgési amplitudó két szomszédos atom tipikus távolságánál kisebb legyen!
Tools used in this lab
- SRS830 Lock-In + használati utasítás + tápkábel
- Siglent SDG1025 függvénygenerátor + használati utasítás (elektronikusan) + tápkábel
- GPIB <-> USB adapter + 1 GPIB kábel VAGY 1db soros port + kábel és 1db USB kábel a kommunikációhoz
- LC kör fém dobozban
- Kvarc oszcillátorok
- Ellenállásdekád
 -os lezáró
-os lezáró
- 6db. közepes BNC-BNC kábel
- BNC T-elosztó
- Digitális mikroszkóp állvánnyal és csatlakozással a kvarc szenzorhoz
- Fogó a kvarc szenzor tokjának kibontásához
- Kvarc oszcillátorra felhelyezendő rézdrót
- Gillette-penge
- vákuumzsír a rézdrót felragasztásához
- Csipesz vagy hosszabb drót a kis drótdarabok és a vákuumzsír felhelyezéséhez
Supplementary information
- For the testing the connection of the serial port one can use NI MAX (description in Hungarian). In the measurement controller program use the SerialPort object (example). In case of the SR830 lock-in amplifier set up the parameters with the following code:
serialPort1.PortName = "COM1"; serialPort1.DataBits = 8; serialPort1.StopBits = StopBits.One; serialPort1.Parity = Parity.None; serialPort1.BaudRate = 9600; serialPort1.NewLine = "\r"; serialPort1.DtrEnable = true; serialPort1.Handshake = Handshake.None;
Note that, the baud rate can be changed on the amplifier, check it in its own menu. The serialPort1 is the name of an object, use it consequently. Do not forget to set up the PortName property in the proper way (the default value in case of the serial port of the motherboard is COM1).