„Kinematika - 1.4.17” változatai közötti eltérés
A Fizipedia wikiből
| (egy szerkesztő 2 közbeeső változata nincs mutatva) | |||
| 8. sor: | 8. sor: | ||
}} | }} | ||
== Feladat == | == Feladat == | ||
| − | </noinclude><wlatex># (1.4.17) Egy gőzgép hajtókereke egyenletes $\omega$ szögsebességgel forog az $0$ középpontján átmenő tengely körül. A kerék $l$ hosszúságú hajtórúdjának $N$ csuklópontja az $0$-tól $r$ távolságban van, $M$ vége pedig a dugattyúkarhoz csatlakozik, amely vízszintesen mozog ide-oda. Mekkora az $M$ pont sebessége abban a pillanatban, amikor $ON$ a vízszintessel $\varphi$ szöget zár be? ($0$ a dugattyú-karral egy egyenesen fekszik.)[[Kép:Kfgy1_03_1_4_17.svg|none| | + | </noinclude><wlatex># (*1.4.17) Egy gőzgép hajtókereke egyenletes $\omega$ szögsebességgel forog az $0$ középpontján átmenő tengely körül. A kerék $l$ hosszúságú hajtórúdjának $N$ csuklópontja az $0$-tól $r$ távolságban van, $M$ vége pedig a dugattyúkarhoz csatlakozik, amely vízszintesen mozog ide-oda. Mekkora az $M$ pont sebessége abban a pillanatban, amikor $ON$ a vízszintessel $\varphi$ szöget zár be? ($0$ a dugattyú-karral egy egyenesen fekszik.)[[Kép:Kfgy1_03_1_4_17.svg|none|255px]] |
</wlatex><includeonly><wlatex>{{Útmutatás|content=Az $NOM$ háromszögre cosinus-tételt alkalmazzunk!}}{{Végeredmény|content=$$v(\varphi)=r\omega\sin\varphi\left[1+\frac{r\cos\varphi}{\sqrt{l^{2}-r^{2}\sin^{2}\varphi}}\right]$$}}</wlatex></includeonly><noinclude> | </wlatex><includeonly><wlatex>{{Útmutatás|content=Az $NOM$ háromszögre cosinus-tételt alkalmazzunk!}}{{Végeredmény|content=$$v(\varphi)=r\omega\sin\varphi\left[1+\frac{r\cos\varphi}{\sqrt{l^{2}-r^{2}\sin^{2}\varphi}}\right]$$}}</wlatex></includeonly><noinclude> | ||
| + | |||
== Megoldás == | == Megoldás == | ||
| − | <wlatex>#: Vegyük kezdőpillanatnak azt, amikor az $N$ csuklópont az $OM$ egyenesre illeszkedik, vagyis amikor $\varphi=0 | + | <wlatex>#: Vegyük kezdőpillanatnak azt, amikor az $N$ csuklópont az $OM$ egyenesre illeszkedik, vagyis amikor $\varphi=0$, így $\varphi(t)=\omega t$. Az $OM$ szakasz hosszát jelöljük $x(t)$-vel. Ha $O$ a koordinátarendszer origója, akkor $x(t)$ egyben $M$ pont tisztán $x$ tengely menti mozgását is leírja ($y(t)\equiv 0$). Az $NOM$ háromszögre cosinus-tételt alkalmazva $$l^{2}=r^{2}+x(t)^{2}-2rx(t)\cos(\varphi(t))$$ adódik. Ebből a másodfokú egyenletből $$x(t)=r\cos(\omega t)+\sqrt{l^{2}-r^{2}\sin^{2}(\omega t)}$$ eredményre jutunk. Az $M$ pont sebessége $$v(t)=\frac{dx}{dt}=-r\omega\sin\varphi\left[1+\frac{r\cos\varphi}{\sqrt{l^{2}-r^{2}\sin^{2}\varphi}}\right]\,.$$ Elkerülhető a másodfokú egyenlet, ha az $OM$-re merőleges magassággal két derékszögú háromszögre osztjuk az $ONM$ háromszöget. |
</wlatex> | </wlatex> | ||
</noinclude> | </noinclude> | ||
A lap jelenlegi, 2015. március 6., 17:21-kori változata
| [rejt] Navigáció Pt·1·2·3 |
|---|
| Kísérleti fizika gyakorlat 1. |
| Gyakorlatok listája: |
| Mechanika - Mozgástan |
| Feladatok listája: |
| © 2012-2013 BME-TTK, TÁMOP4.1.2.A/1-11/0064 |
Feladat
- (*1.4.17) Egy gőzgép hajtókereke egyenletes
 szögsebességgel forog az
szögsebességgel forog az  középpontján átmenő tengely körül. A kerék
középpontján átmenő tengely körül. A kerék  hosszúságú hajtórúdjának
hosszúságú hajtórúdjának  csuklópontja az -tól
csuklópontja az -tól  távolságban van,
távolságban van,  vége pedig a dugattyúkarhoz csatlakozik, amely vízszintesen mozog ide-oda. Mekkora az pont sebessége abban a pillanatban, amikor
vége pedig a dugattyúkarhoz csatlakozik, amely vízszintesen mozog ide-oda. Mekkora az pont sebessége abban a pillanatban, amikor  a vízszintessel
a vízszintessel  szöget zár be? ( a dugattyú-karral egy egyenesen fekszik.)
szöget zár be? ( a dugattyú-karral egy egyenesen fekszik.)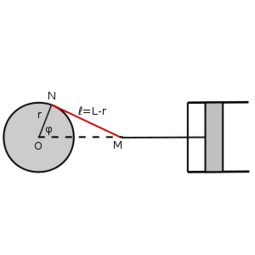

Megoldás
- Vegyük kezdőpillanatnak azt, amikor az csuklópont az
 egyenesre illeszkedik, vagyis amikor
egyenesre illeszkedik, vagyis amikor  , így
, így  . Az szakasz hosszát jelöljük
. Az szakasz hosszát jelöljük  -vel. Ha
-vel. Ha  a koordinátarendszer origója, akkor egyben pont tisztán
a koordinátarendszer origója, akkor egyben pont tisztán  tengely menti mozgását is leírja (
tengely menti mozgását is leírja ( ). Az
). Az  háromszögre cosinus-tételt alkalmazva adódik. Ebből a másodfokú egyenletből
háromszögre cosinus-tételt alkalmazva adódik. Ebből a másodfokú egyenletből![\[l^{2}=r^{2}+x(t)^{2}-2rx(t)\cos(\varphi(t))\]](/images/math/8/d/e/8decdc02303386aa8879ba5da1c77fce.png) eredményre jutunk. Az
eredményre jutunk. Az![\[x(t)=r\cos(\omega t)+\sqrt{l^{2}-r^{2}\sin^{2}(\omega t)}\]](/images/math/6/f/7/6f7752a14d0369e87945fb3bcffcfa0b.png) pont sebessége Elkerülhető a másodfokú egyenlet, ha az
pont sebessége Elkerülhető a másodfokú egyenlet, ha az![\[v(t)=\frac{dx}{dt}=-r\omega\sin\varphi\left[1+\frac{r\cos\varphi}{\sqrt{l^{2}-r^{2}\sin^{2}\varphi}}\right]\,.\]](/images/math/4/5/4/4543111ba89523b6eaff698faa490847.png) -re merőleges magassággal két derékszögú háromszögre osztjuk az
-re merőleges magassággal két derékszögú háromszögre osztjuk az  háromszöget.
háromszöget.
- Vegyük kezdőpillanatnak azt, amikor az