„Erőtan II. - 4.3” változatai közötti eltérés
A Fizipedia wikiből
(→Megoldás) |
|||
| 16. sor: | 16. sor: | ||
<wlatex>#: a) A gyorsítás hatására a kocsihoz rögzített vonatkoztatási rendszerben egy vízszintes irányú, $F_{t}=ma_{0}$ nagyságú tehetetlenségi erő is hat az ingára. Így a kezdeti időpillanatban az eredő erő nem zérus, az inga nincs egyensúlyban, tehát elkezd lengeni. | <wlatex>#: a) A gyorsítás hatására a kocsihoz rögzített vonatkoztatási rendszerben egy vízszintes irányú, $F_{t}=ma_{0}$ nagyságú tehetetlenségi erő is hat az ingára. Így a kezdeti időpillanatban az eredő erő nem zérus, az inga nincs egyensúlyban, tehát elkezd lengeni. | ||
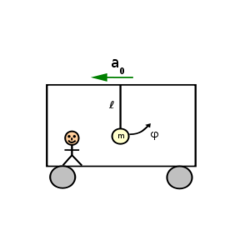
#: b) A test pozícióját egyértelműen meghatározza a $\varphi(t)$ szög, melyet a függőlegestől mérünk. A gravitációs erőt és a tehetlenségi erőt felbontottuk egy kötéllel párhuzamos és egy arra merőleges komponensre. Az erők a kötél irányában kiegyenlítik egymást. Arra merőleges irányban $$ma_{t}(t)=-mg\sin\alpha+ma_{0}\cos\alpha\,.$$ ahol a tangenciális gyorsulás $a_{t}=l\ddot{\varphi}$ szerint függ össze a szöggyorsulásal. A mozgásegyenlet jobboldalán $\sqrt{g^{2}+a_{0}^{2}}$-t kiemelve $$l\ddot{\varphi}=-\sqrt{g^{2}+a_{0}^{2}}\left(\frac{g}{\sqrt{g^{2}+a_{0}^{2}}}\sin\varphi-\frac{a_{0}}{\sqrt{g^{2}+a_{0}^{2}}}\cos\varphi\right)\,.$$ Vezessük be a $\varphi_{0}$ egyensúlyi kitérést úgy, hogy $$\sin\varphi_{0}=\frac{a_{0}}{\sqrt{g^{2}+a_{0}^{2}}}\qquad\qquad \cos\varphi_{0}=\frac{g}{\sqrt{g^{2}+a_{0}^{2}}}\,.$$ Ekkor a mozgásegyenlet $$\ddot{\varphi}+\omega^{2}\sin(\varphi-\varphi_{0})=0\qquad\qquad \omega^{2}=\frac{\sqrt{g^{2}+a_{0}^{2}}}{l}$$ alakban írható. Ezt a differenciál egyenletet kellene megoldani a $\varphi(0)=0$ és $\dot{\varphi}(0)=0$ kezdeti feltételekkel. | #: b) A test pozícióját egyértelműen meghatározza a $\varphi(t)$ szög, melyet a függőlegestől mérünk. A gravitációs erőt és a tehetlenségi erőt felbontottuk egy kötéllel párhuzamos és egy arra merőleges komponensre. Az erők a kötél irányában kiegyenlítik egymást. Arra merőleges irányban $$ma_{t}(t)=-mg\sin\alpha+ma_{0}\cos\alpha\,.$$ ahol a tangenciális gyorsulás $a_{t}=l\ddot{\varphi}$ szerint függ össze a szöggyorsulásal. A mozgásegyenlet jobboldalán $\sqrt{g^{2}+a_{0}^{2}}$-t kiemelve $$l\ddot{\varphi}=-\sqrt{g^{2}+a_{0}^{2}}\left(\frac{g}{\sqrt{g^{2}+a_{0}^{2}}}\sin\varphi-\frac{a_{0}}{\sqrt{g^{2}+a_{0}^{2}}}\cos\varphi\right)\,.$$ Vezessük be a $\varphi_{0}$ egyensúlyi kitérést úgy, hogy $$\sin\varphi_{0}=\frac{a_{0}}{\sqrt{g^{2}+a_{0}^{2}}}\qquad\qquad \cos\varphi_{0}=\frac{g}{\sqrt{g^{2}+a_{0}^{2}}}\,.$$ Ekkor a mozgásegyenlet $$\ddot{\varphi}+\omega^{2}\sin(\varphi-\varphi_{0})=0\qquad\qquad \omega^{2}=\frac{\sqrt{g^{2}+a_{0}^{2}}}{l}$$ alakban írható. Ezt a differenciál egyenletet kellene megoldani a $\varphi(0)=0$ és $\dot{\varphi}(0)=0$ kezdeti feltételekkel. | ||
| − | #: c) A $\varphi(t)$ mennyiséget a $$\ddot{\varphi}+\omega^{2}\sin(\varphi-\varphi_{0})=0$$ differenciálegyenlet határozza meg, ahol $$\varphi_{0}=2,86^{\circ}\qquad\qquad\omega=\sqrt{\frac{\sqrt{g^{2}+a_{0}^{2}}}{l}}=3,16\frac{1}{\,\mathrm{s}}\,.$$ A differenciálegyenletet nem lehet általánosan megoldani csak kis kitérésekre. A lengés során $0<\varphi(t)<2\varphi_{0}$, ezért kis kitérésű lengésekről akkor beszélhetünk, ha $\varphi_{0}$ is kicsi. Ez akkor, teljesül, ha $a_{0}\ll g$. Ebben a határesetben $\sin(\varphi-\varphi_{0})\approx \varphi-\varphi_{0}$, vagyis a differenciálegyenlet $$\ddot{\varphi}+\omega^{2}(\varphi-\varphi_{0})=0$$ szerint írható. A $\Delta\varphi(t)=\varphi(t)-\varphi_{0}$-ra vonatkozó $$\Delta\ddot{\varphi}+\omega^{2}\Delta\varphi=0$$ differenciálegyenlet két független megoldása $\sin(\omega t)$ és $\cos(\omega t)$, így $$\varphi(t)=\varphi_{0}+A\sin(\omega t)+B\cos(\omega t)\,,$$ melyben az $A$ és $B$ paramétereket a kezdeti feltételek segítségével illeszthetjük. $$0=\varphi(0)=\varphi_{0}+B\qquad\Rightarrow\qquad B=-\varphi_{0}$$ $$0=\dot{\varphi}(0)=A\omega \qquad\Rightarrow\qquad A=0$$ Tehát $$\varphi(t)=\varphi_{0}\left(1-\cos(\omega t)\right)\,.$$ | + | #: c) A $\varphi(t)$ mennyiséget a $$\ddot{\varphi}+\omega^{2}\sin(\varphi-\varphi_{0})=0$$ differenciálegyenlet határozza meg, ahol $$\varphi_{0}=2,86^{\circ}\qquad\qquad\omega=\sqrt{\frac{\sqrt{g^{2}+a_{0}^{2}}}{l}}=3,16\frac{1}{\,\mathrm{s}}\,.$$ A differenciálegyenletet nem lehet általánosan megoldani csak kis kitérésekre. A lengés során $0<\varphi(t)<2\varphi_{0}$, ezért kis kitérésű lengésekről akkor beszélhetünk, ha $\varphi_{0}$ is kicsi. Ez akkor, teljesül, ha $a_{0}\ll g$. Ebben a határesetben $\sin(\varphi-\varphi_{0})\approx \varphi-\varphi_{0}$, vagyis a differenciálegyenlet $$\ddot{\varphi}+\omega^{2}(\varphi-\varphi_{0})=0$$ szerint írható. A $\Delta\varphi(t)=\varphi(t)-\varphi_{0}$-ra vonatkozó $$\Delta\ddot{\varphi}+\omega^{2}\Delta\varphi=0$$ differenciálegyenlet két független megoldása $\sin(\omega t)$ és $\cos(\omega t)$, így $$\varphi(t)=\varphi_{0}+A\sin(\omega t)+B\cos(\omega t)\,,$$ melyben az $A$ és $B$ paramétereket a kezdeti feltételek segítségével illeszthetjük. $$0=\varphi(0)=\varphi_{0}+B\qquad\Rightarrow\qquad B=-\varphi_{0}$$ $$0=\dot{\varphi}(0)=A\omega \qquad\Rightarrow\qquad A=0$$ Tehát $$\varphi(t)=\varphi_{0}\left(1-\cos(\omega t)\right)\,.$$[[Kép:Kfgy1_05_4_3m.svg |none|250px]] |
</wlatex> | </wlatex> | ||
</noinclude> | </noinclude> | ||
A lap 2013. június 20., 12:14-kori változata
| Navigáció Pt·1·2·3 |
|---|
| Kísérleti fizika gyakorlat 1. |
| Gyakorlatok listája: |
| Mechanika - Erőtan II. |
| Feladatok listája: |
| © 2012-2013 BME-TTK, TÁMOP4.1.2.A/1-11/0064 |
Feladat
- Egy vasúti kocsiban
 hosszúságú fonálra pontszerű
hosszúságú fonálra pontszerű  tömeget felfüggesztve ingát készítenek. A vasúti kocsi
tömeget felfüggesztve ingát készítenek. A vasúti kocsi  időpontban vízszintes pályán
időpontban vízszintes pályán  gyorsulással kezd mozogni.
gyorsulással kezd mozogni.  ,
,  ,
,  .
.
- a) Milyennek észleli az tömegű test mozgását a vasúti kocsiban levő megfigyelő?
- b) Külön ábrán jelölje be az tömegű testre - a gyorsuló kocsi koordinátarendszerében - ható erőket, és írja fel a test mozgásegyenletét!
- c) Határozza meg a test mozgását leíró
 függvényt! (A függvény jellemző mennyiségeit számszerűen adja meg!)
függvényt! (A függvény jellemző mennyiségeit számszerűen adja meg!)
- a) Milyennek észleli az
Megoldás
- a) A gyorsítás hatására a kocsihoz rögzített vonatkoztatási rendszerben egy vízszintes irányú,
 nagyságú tehetetlenségi erő is hat az ingára. Így a kezdeti időpillanatban az eredő erő nem zérus, az inga nincs egyensúlyban, tehát elkezd lengeni.
nagyságú tehetetlenségi erő is hat az ingára. Így a kezdeti időpillanatban az eredő erő nem zérus, az inga nincs egyensúlyban, tehát elkezd lengeni.
- b) A test pozícióját egyértelműen meghatározza a szög, melyet a függőlegestől mérünk. A gravitációs erőt és a tehetlenségi erőt felbontottuk egy kötéllel párhuzamos és egy arra merőleges komponensre. Az erők a kötél irányában kiegyenlítik egymást. Arra merőleges irányban ahol a tangenciális gyorsulás
![\[ma_{t}(t)=-mg\sin\alpha+ma_{0}\cos\alpha\,.\]](/images/math/e/c/2/ec2a1484c34368c1a4c84b4b95a01cc5.png)
 szerint függ össze a szöggyorsulásal. A mozgásegyenlet jobboldalán
szerint függ össze a szöggyorsulásal. A mozgásegyenlet jobboldalán  -t kiemelve Vezessük be a
-t kiemelve Vezessük be a![\[l\ddot{\varphi}=-\sqrt{g^{2}+a_{0}^{2}}\left(\frac{g}{\sqrt{g^{2}+a_{0}^{2}}}\sin\varphi-\frac{a_{0}}{\sqrt{g^{2}+a_{0}^{2}}}\cos\varphi\right)\,.\]](/images/math/e/1/c/e1cf1d966e16cd066b1c7b2c73d5fc0f.png)
 egyensúlyi kitérést úgy, hogy Ekkor a mozgásegyenlet
egyensúlyi kitérést úgy, hogy Ekkor a mozgásegyenlet![\[\sin\varphi_{0}=\frac{a_{0}}{\sqrt{g^{2}+a_{0}^{2}}}\qquad\qquad \cos\varphi_{0}=\frac{g}{\sqrt{g^{2}+a_{0}^{2}}}\,.\]](/images/math/8/6/6/8665cfb78e2531629adf4dd7c70fa915.png) alakban írható. Ezt a differenciál egyenletet kellene megoldani a
alakban írható. Ezt a differenciál egyenletet kellene megoldani a![\[\ddot{\varphi}+\omega^{2}\sin(\varphi-\varphi_{0})=0\qquad\qquad \omega^{2}=\frac{\sqrt{g^{2}+a_{0}^{2}}}{l}\]](/images/math/b/8/f/b8f1bae2e60896ac4d19593ca66f4216.png)
 és
és  kezdeti feltételekkel.
kezdeti feltételekkel.
- c) A mennyiséget a differenciálegyenlet határozza meg, ahol
![\[\ddot{\varphi}+\omega^{2}\sin(\varphi-\varphi_{0})=0\]](/images/math/2/1/7/217bbba3eff309e72f8523ed7d611895.png) A differenciálegyenletet nem lehet általánosan megoldani csak kis kitérésekre. A lengés során
A differenciálegyenletet nem lehet általánosan megoldani csak kis kitérésekre. A lengés során![\[\varphi_{0}=2,86^{\circ}\qquad\qquad\omega=\sqrt{\frac{\sqrt{g^{2}+a_{0}^{2}}}{l}}=3,16\frac{1}{\,\mathrm{s}}\,.\]](/images/math/7/1/d/71d30a1fb3901ebb8d46a5a1980dae1a.png)
 , ezért kis kitérésű lengésekről akkor beszélhetünk, ha is kicsi. Ez akkor, teljesül, ha
, ezért kis kitérésű lengésekről akkor beszélhetünk, ha is kicsi. Ez akkor, teljesül, ha  . Ebben a határesetben
. Ebben a határesetben  , vagyis a differenciálegyenlet szerint írható. A
, vagyis a differenciálegyenlet szerint írható. A![\[\ddot{\varphi}+\omega^{2}(\varphi-\varphi_{0})=0\]](/images/math/c/8/9/c89ff5b19a04c7743b4eb3a6f75ee762.png)
 -ra vonatkozó differenciálegyenlet két független megoldása
-ra vonatkozó differenciálegyenlet két független megoldása![\[\Delta\ddot{\varphi}+\omega^{2}\Delta\varphi=0\]](/images/math/6/b/b/6bb94a1cfa9e5406a1b5ea0279b90f3f.png)
 és
és  , így melyben az
, így melyben az![\[\varphi(t)=\varphi_{0}+A\sin(\omega t)+B\cos(\omega t)\,,\]](/images/math/3/9/5/395ed8c0a89759a0aa06a00679ffad44.png)
 és
és  paramétereket a kezdeti feltételek segítségével illeszthetjük.
paramétereket a kezdeti feltételek segítségével illeszthetjük. ![\[0=\varphi(0)=\varphi_{0}+B\qquad\Rightarrow\qquad B=-\varphi_{0}\]](/images/math/1/6/2/162f7e2ffef812fd10b98222010633b9.png) Tehát
Tehát![\[0=\dot{\varphi}(0)=A\omega \qquad\Rightarrow\qquad A=0\]](/images/math/0/c/0/0c0886ba591c4149bf8f4ad36c924c76.png)
![\[\varphi(t)=\varphi_{0}\left(1-\cos(\omega t)\right)\,.\]](/images/math/d/c/a/dca653c0e413994cbcadd46baf738e40.png)
- a) A gyorsítás hatására a kocsihoz rögzített vonatkoztatási rendszerben egy vízszintes irányú,
